
Locomotion Laboratory, das Lauflabor der TU Darmstadt: Wo Roboter laufen lernen
von Michael Holljes 23. November 2015
„Alle fertig? Alles klar, Messung läuft!“ Dieser Satz war im Juli 2015 sehr häufig in den Räumen des Lauflabors/Locomotion Laboratory am Sportinstitut der Technischen Universität Darmstadt während einer Studie zu hören, mit dem unscheinbare Experimente eingeleitet wurden, welche am Ende zu einem beeindruckenden Resultat führen sollen.
„Das Ziel unserer Messungen hier ist ein Beitrag zum europäischen B.A.L.A.N.C.E. Projekt, bei dem ein Exoskelett entwickelt werden soll, das beeinträchtigten Personen – dies kann nach einem Unfall, aber auch beim Tragen schwerer Lasten sein – in kritischen Situationen dabei hilft, nicht aus dem Gleichgewicht zu geraten“, weiß Doktorand Dario Tokur zu berichten. Zu diesem Zweck werden Probanden in Störexperimenten aus der Balance gebracht, um festzustellen, wie sie ihre Muskeln ansteuern und ihre Gliedmaßen bewegen um das Gleichgewicht wieder herzustellen. Dies ist aber nur eines von vielen Projekten die in den Laborräumen der Arbeitsgruppe durchgeführt werden.

Ein kleiner Blick zurück: in den Jahren 2003 bis 2011 entstand die Arbeitsgruppe Lauflabor an der Friedrich-Schiller-Universität in Jena; bis zum Sommer 2012 ist das gesamte Labor mit Leiter André Seyfarth nach Darmstadt umgezogen, der dort auf eine Professur im Bereich Sportbiomechanik berufen wurde. Ein Schwerpunkt ist es, biomechanische Modelle zu entwickeln, die verschiedene Eigenschaften der menschlichen Fortbewegung, aber auch die anatomischen Eigenschaften abbilden. „Wir können hier an verschiedensten Orten Messungen durchführen, sogar im hochschuleigenen Leichtathletikstadion auf der Start/Ziel – Geraden sowie an der Weitsprunggrube“, erzählt Tokur weiter. Besonders stolz ist man hier aber auf den Lauftrack, eine erhöhte Plattform, die Kraftmessplatten und eine vertikale Störplattform enthält. „Mithilfe dieser Störplattform lassen sich Projekte wie B.A.L.A.N.C.E realisieren“, erklärt Christian Schumacher, ebenfalls Doktorand in der Arbeitsgruppe. „Damit lassen sich unerwartete Hindernisse wie Schlaglöcher oder vorhersehbare Dinge wie Bordsteinkanten simulieren. Und durch die aufgenommenen Daten von Bodenreaktionskräften, Bewegungsverläufen und Muskelaktivität lässt sich am Ende des Prozesses das Modell optimieren bzw. anpassen.“
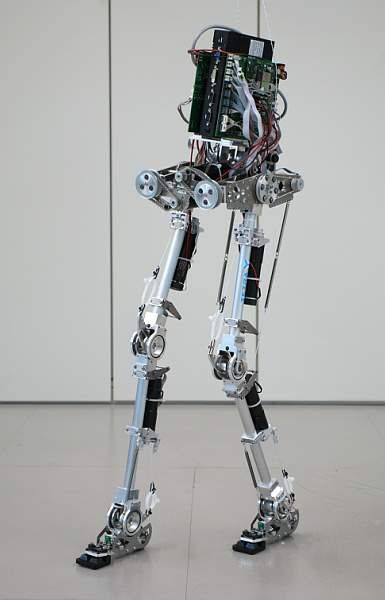
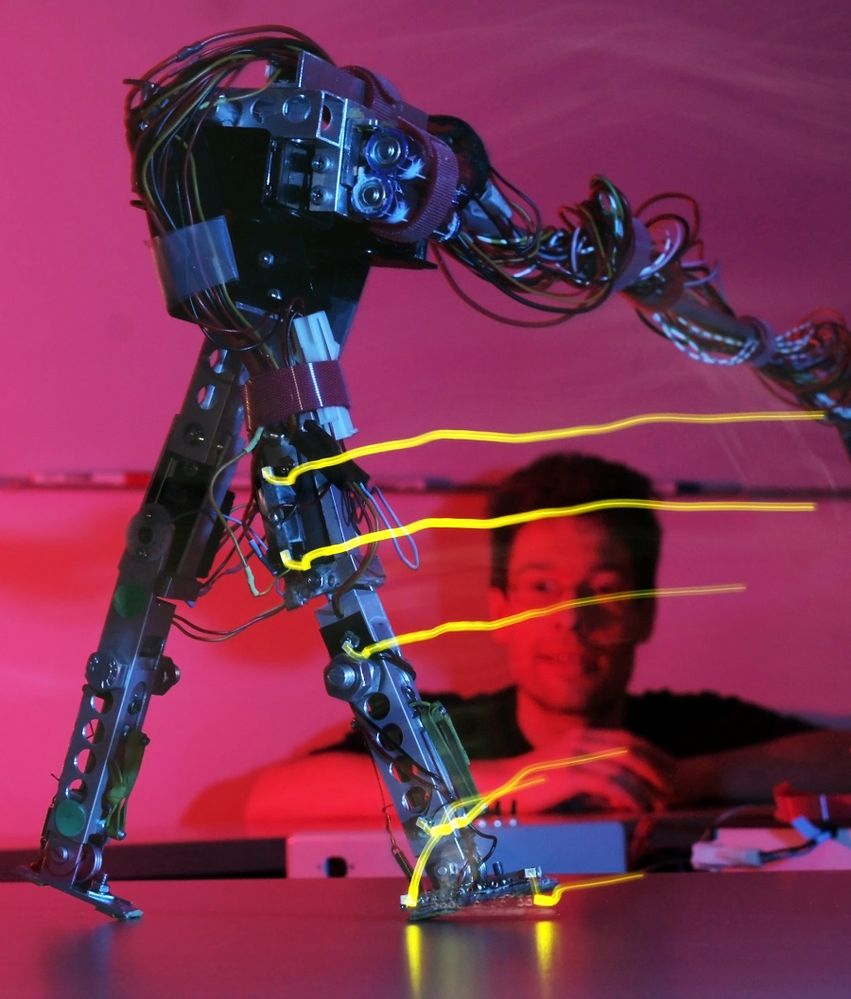
Doch nach der Modellierung der Bewegungen ist hier noch nicht Schluss; anhand von Robotern, aktuierter Prothesen und Orthesen werden diese Modelle dann wiederum auf ihre Gültigkeit überprüft. Eine Roboterkonstruktion wie der BioBiped III ist eines dieser Resultate aus den Modellen; er besteht aus zwei Beinen sowie einer Hüfte und ist in der Lage, in verschiedenen Konfigurationen zu hüpfen. Anhand dieser Maschine und ihrer Nachfolger sollen Hypothesen zum menschlichen Gang überprüft werden. Ein anderes Projekt ist PAKO (Powered Ankle Knee Orthoprothesis), welches initiiert wurde, um die Funktion des menschlichen Knöchels zu analysieren und besser zu verstehen. Die Orthese stellt ein robotisches System dar, das sich eine Person um die Beine schnallen kann. Je nachdem wie PAKO angesteuert wird, kann so das natürliche Gangbild beeinflusst und untersucht werden. Neben des gemeinsamen Forschungsziels haben die Projekte BioBiped und PAKO weitere Gemeinsamkeiten: sie sind Forschungsplattformen, die für den Alltagsgebrauch (noch) nicht einsetzbar sind.
Vieles in diesem Bereich der Robotik steckt noch in den Kinderschuhen, aber der technologische Fortschritt der letzten Jahre ermöglicht es, kompakter und leichter zu bauen, sodass eine Unterstützung von bewegungsbeeinträchtigten Menschen durch Roboterelemente immer näherrückt. Die Liste der Projekte ist lang, die Arbeit daran vielversprechend und der Nutzen dieser ohne Zweifel; in Darmstadt wird an der Zukunft geforscht, sodass beeinträchtigte Menschen wieder laufen können. Doch bis es so weit ist, muss noch in die Forschung investiert werden, das gilt für Geld als auch Arbeit – und zumindest das Letztere wird auf jede Menge Schultern verteilt.
Das Team um Professor Seyfarth besteht aus mehreren Postdoktoranden und Doktoranden, welche von motivierten studentischen Hilfskräften bei der Forschungsarbeit unterstützt werden. „Es ist toll, dass wir als Hilfskräfte bei so einem Projekt Aufgaben mit hoher Verantwortung übertragen bekommen“, erzählt Michael Holljes, einer der Hilfskräfte, während er eine Datenaufnahme für das B.A.L.A.N.C.E – Projekt leitet. „Das ist nicht selbstverständlich an der Uni.“
Doch nicht nur auf die Forschung legen die Darmstädter wert, auch die Lehre nimmt einen großen Teil der Zeit in Anspruch. Durch verschiedene Vorlesungen zum Thema Forschung und ihre Methoden oder auch ganz konkret zur Biomechanik wird versucht, die Studierenden für das Thema zu begeistern. Mithilfe von Demonstrationen im Labor und der Möglichkeit, selbst Experimente für diese Veranstaltungen durchzuführen, wird direkt praktische Forschungsarbeit gelehrt. „Unser Lehrkonzept baut darauf, dass die Studierenden vorbereitet in die Veranstaltungen kommen, damit wir eine Basis haben, auf der wir uns ohne größere Rückfragen verständigen können“, sagt Professor Seyfarth. „Dieses Konzept erlaubt es uns, so eng an der Forschung zu lehren, da wir nicht die volle Präsenzzeit benötigen, um den Lehrstoff zu vermitteln, sondern stattdessen Demonstrationen und Diskussionen zum Thema abhalten können.“
Und der Erfolg dieses Konzepts zeigt sich: In einer Vielzahl von öffentlich zugänglichen Wiki-Seiten lassen sich auf der institutseigenen Wiki – Plattform Ausarbeitungen zu interessanten Themengebieten im Bereich Biomechanik nachlesen. Bei allen Projekten verliert die Arbeitsgruppe jedoch niemals ihren Fokus: Nachwuchs ausbilden und technischen Systemen das natürliche menschliche Laufen näher bringen.
-

Gastbeitrag von
Michael Holljes, studentischer Hilfswissenschaftler im Lauflabor
Ausführliche Informationen: Lauflabor „Locomotion Laboratory“ des Sportinstitutes der TU Darmstadt, Lehrprojekt „MotASys – Mensch-orientierte technische Assistenzsysteme“, Homepage des BioBiped, Forschungsprojekte aus dem Bereich Beinprothetik
-
