
LUHbots – Das RoboCup@Work-Team der Leibniz Universität Hannover
von Team LUHbots 10. Februar 2016Das Team LUHbots wurde 2012 von Maschinenbau- und Mechatronikstudenten der Leibniz Universität Hannover gegründet. Die Intention der engagierten Studenten war es, sich über das Studium hinaus mit Anwendungsmöglichkeiten der Robotik zu beschäftigen. Mittlerweile ist LUHbots eine echte Erfolgsgeschichte.
So sehen Sieger aus! Nachdem wir im April 2015 bereits die Deutsche Meisterschaft in der @Work-Liga gewinnen konnten, haben wir uns Ende Juli in China auf dem RoboCup 2015 auch den Weltmeistertitel sichern können.
Der Startschuss für unser Team war die praxisorientierte Vorlesung RobotChallenge am Institut für Mechatronische Systeme an der Leibniz Universität Hannover im Jahr 2011. In der Challenge treten zwei studentische Teams gegeneinander an und müssen mit dem mobilen Roboter youBot der Firma KUKA verschiedene Aufgaben im Bereich der Robotik lösen. Darunter fallen autonome Navigation, Manipulation von Objekten und digitale Bildverarbeitung.

Alle diese Bewegungsarten sind auch gleichzeitig ausführbar, sodass er sehr flexibel in der Bewegung ist. Besonders in engen Lagerhallen ist diese Antriebsart sehr vorteilhaft. Ein Nachteil der Mecanum-Räder ist, dass sie durch ihre hohe Reibung nicht energieeffizient sind.
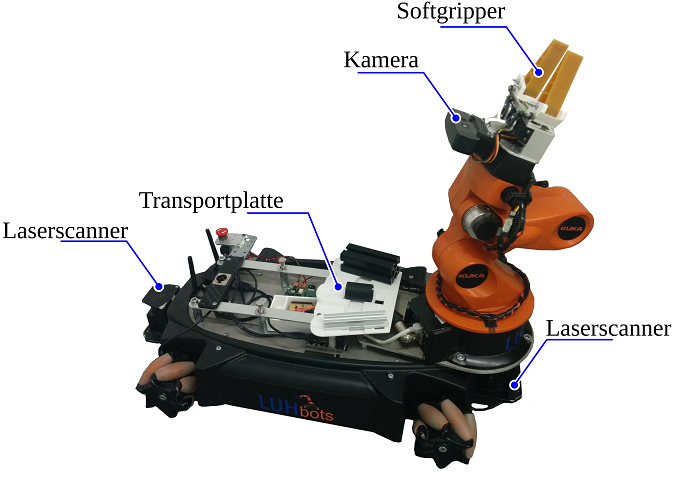
In Kombination mit der fahrenden Basis lassen sich mit dem Arm-Manipulator des YouBot Objekte auch aus schwierigen Lagen greifen. Um die Leistungsfähigkeit unseres Roboters zu steigern und komplexere Aufgaben lösen zu können, haben wir den YouBot mit einem leistungsstarken Rechner ausgestattet und Laserscanner angebracht. In Kombination mit einem Monte-Carlo-Algorithmus ermöglichen diese die Lokalisation in der Wettkampfarena. Durch einen Pfadplaner wird ein Weg durch die Umgebung zum Ziel geplant. Hierdurch werden Hindernisse sicher umfahren. Der Greifer wurde von uns selbst weiterentwickelt, sodass er schneller und außerdem größere Objekte greifen kann. Die Softgripperbacken verwenden wir, um möglichen Schäden des Arms vorzubeugen, die bei Kollisionen des Greifers während der Greifbewegung entstehen könnten. Die Manipulation wurde ebenfalls weiterentwickelt. Unter anderem mit einer inversen Kinematik sowie einer Graviationskompensation. Letztere ermöglicht die Positionierung des Roboterarms per Hand. Mit der für die Wettkämpfe entwickelten Bilderkennung können Objekte in jeder Orientierung erkannt werden.
Mittels kontinuierlicher Hard- und Software-Erweiterungen haben wir uns über die Jahre konstant auf dem Siegertreppchen halten können. Bis jetzt konnten wir an Wettbewerben in China, Brasilien, Portugal, Niederlande und Mexico teilnehmen. Es ist ein unglaubliches Erlebnis für uns, in ein fremdes Land zu reisen und gegen andere Teams anzutreten. Ein besonderer Reiz liegt hierbei darin, dass wir in kürzester Zeit auftretende Herausforderungen im unbekannten Umfeld lösen können. Zudem ist es auch möglich, dass unsere Hardware durch den Transport im Flugzeug Schäden aufweist oder, wie bei anderen Teams geschehen, gar nicht erst am Zielflughafen ankommt. In diesem Fall halfen uns in China sehr gastfreundliche Volontäre (Sprachstudenten), einige Ersatzteile für eine Notlösung vor Ort zu beschaffen.
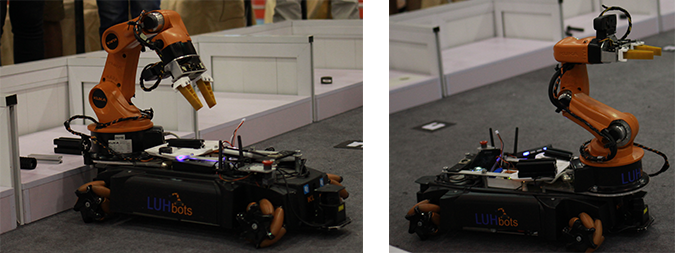
Im Wettkampf geht es darum, die auftretenden neuen Situationen (Abb. 4 und 5) einzulernen und vor den gewerteten Läufen die Hard- oder Software entsprechend anzupassen.
Beim Basic Manipulation Test (BMT) müssen die Roboter drei Objekte von einer Plattform aufheben und auf einer benachbarten Plattform ablegen. Hier liegt der Fokus auf dem Manipulieren. Zusätzliche Punkte können durch undefinierte Positionen, Orientierungen, verschiedene Objekte oder Störobjekte erzielt werden. Der Precision Placement Test (PPT) stellt eine Steigerung des BMT dar: Hier sind von einer Plattform drei Objekte aufzunehmen und jeweils in den Objekten entsprechenden Formen abzulegen. Bei diesem Szenario kann sich der Roboter nicht mehr aussuchen, wo er auf der Plattform das Objekt ablegt. Jetzt muss er erkennen, wo sich das passende Senkloch zum Objekt befindet und wie es ausgerichtet ist. Eine Kombination von Navigation (BNT) und Manipulation (BMT) stellt der Basic Transportation Test (BTT) dar: Der Roboter muss drei Objekte von zwei Plattformen aufgreifen und auf zwei weiteren Plattformen ablegen. Dabei sind deutlich längere Strecken zwischen den Plattformen zurückzulegen. Extended Transportation Test: Im Unterschied zum BTT gibt es neun Objekte die es zu transportieren gilt. Dementsprechend größer sind der Planungsaufwand und die Optimierungsmöglichkeiten, in welcher Reihenfolge die Objekte transportiert werden.

Jedes Teammitglied hat seinen eigenen Arbeitsbereich an dem er am meisten gewirkt hat und für dessen Pflege er auf dem Wettkampf verantwortlich ist. Wenn das Problem jedoch nicht so einfach zu identifizieren oder akut ist, berät das ganze Team welche Strategie in der knapp bemessenen Zeit weiter verfolgt werden soll. Die gemeinsame anwendungsnahe Lösungsorientierung fördert den Teamgeist und bringt das Team näher zusammen.

Die Teilnahme an studentischen Arbeitsgruppen bietet immer viele Möglichkeiten, sein erlerntes Wissen praktisch umzusetzen und Erfahrungen im Team zu sammeln. Daher ist es für die eigene Ausbildung sehr empfehlenswert, besonders wenn es mit Reisen ins Ausland verbunden ist. Man lernt viele Menschen aus anderen Ländern und Städten kennen. Die vergangenen RoboCups in Mexico, Brasilien und China sind tolle Erfahrungen, die den wissenschaftlichen Werdegang bereichern.
Mittlerweile kann die Vorlesung RobotChallenge und das Tutorium/Labor für mobile Robotik für das Studium an der Leibniz Universität Hannover neues und frisches Wissen in der Anwendung vermitteln.
Gastbeitrag von
Team LUHbots, Mechatronik-Zentrum der Leibniz Universität Hannover
Jan Carstensen(1), Torben Carstensen(1), Fabian Schulz(2), Jan Friederichs(2), Daniel Kazcor(3), Jens Kotlarski(3), Tobias Ortmaier(3)
Hannover Centre of Mechatronics
Leibniz University Hannover, www.luhbots.de
Appelstrasse 11, 30167 Hannover, Germany,
Phone +49-511-762-4464
1 LUHbots, Leibniz Universität Hannover, info@luhbots.de
2 Hannover Centre of Mechatronics, Leibniz UniversitätHannover, friederichs@mzh.uni-hannover.de
3 Institute of Mechatronic Systems, Leibniz UniversitätHannover, jens.kotlarski@imes.uni-hannover.de
Ausführliche Informationen: Wenn Ihr mehr Informationen über das Team LUHbots erfahren wollt, besucht unseren YouTube-Channel oder unserer Homepage.
-
